一微半导体“一种沿边绕障路径规划方法、芯片及机器人”专利获授权

集微网消息,天眼查显示,珠海一微半导体股份有限公司近日取得一项名为“一种沿边绕障路径规划方法、芯片及机器人”的专利,授权公告号为CN113190010B,授权公告日为2024年4月5日,申请日为2021年5月8日。
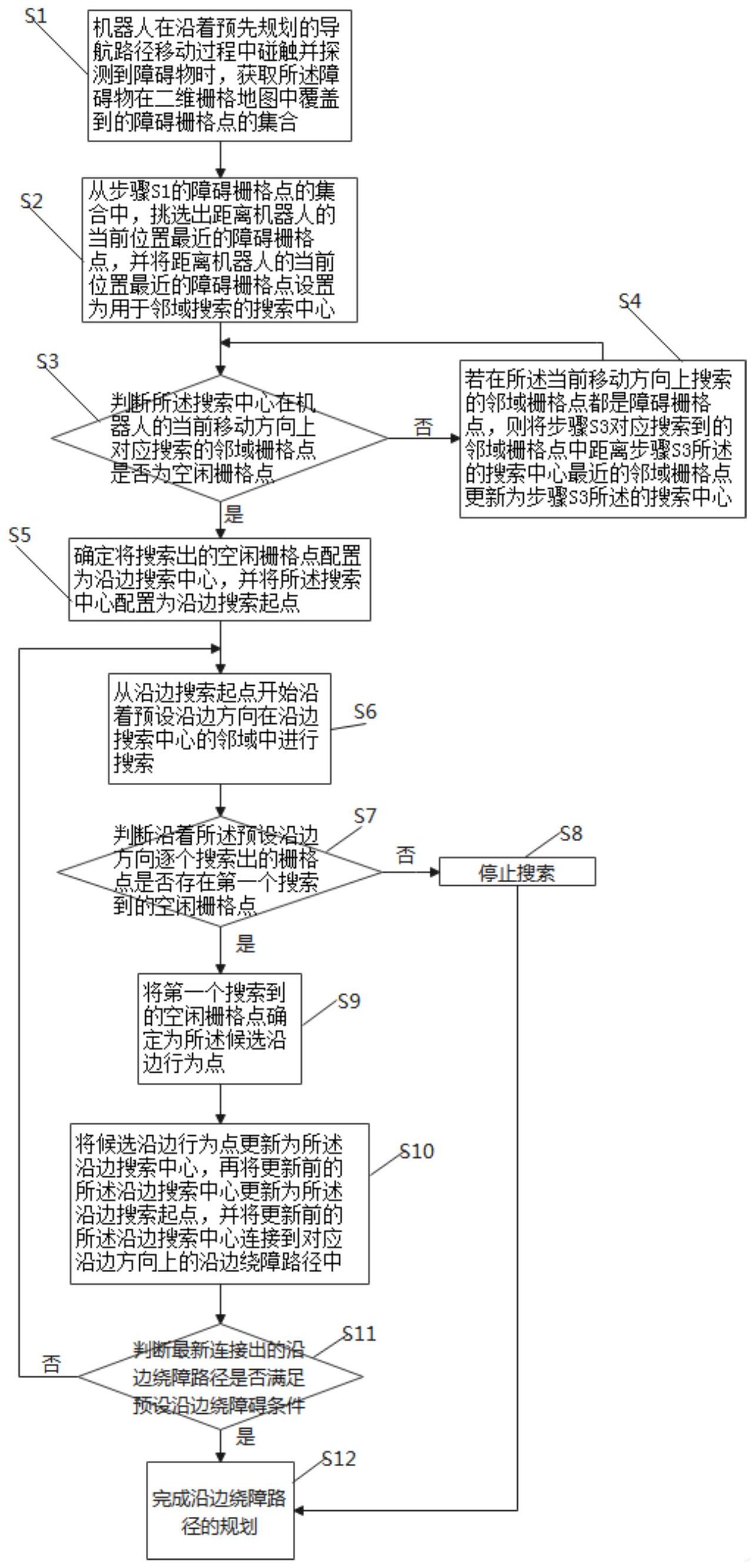
本发明公开一种沿边绕障路径规划方法、芯片及机器人,所述沿边绕障路径规划方法包括:在机器人检测并触碰到障碍物后,从该障碍物出发,朝着机器人的当前移动方向,往机器人的当前位置逐个邻域栅格的搜索,直到搜索出一对相邻的参考空闲栅格点和参考障碍栅格点,再以参考空闲栅格点为中心、参考障碍栅格点为起点进行既定沿边方向上的邻域搜索,实现分别沿着各个沿边方向搜索出支持机器人沿障碍物边缘行走的沿边绕障路径,加快沿边越过当前碰触并检测到的障碍物,进而通过逐个栅格地搜索邻域的方式提高机器人绕障的成功率。




