中国科学院苏州纳米所张其冲等PNAS:低功耗离子人工突触纤维取得新进展

近千亿个神经元通过上百万亿个神经突触连接成的神经网络是人脑强大的低功耗计算能力的基础。突触位于前神经元轴突和后神经元树突/胞体之间,对于神经元之间的信息存储和传递至关重要。仿生神经形态设备如忆阻器、晶体管和人工突触器件可以模拟类似生物的突触可塑性,以实现低功耗信息处理。织物无处不在而且与人体不规则表面兼容,为集成这些架构提供了一个天然平台,有望赋予传统织物信息感知、处理和运动反馈控制等功能。
基于纤维的神经形态器件已经有所报道,比如纤维忆阻器,纤维晶体管和光电人工突触纤维等,但它们主要基于模拟控制电子或空穴载流子的电脉冲模式。相比之下,拥有超过1015个突触的生物系统依赖于水基环境中的多离子和分子载体来处理传递信息。因此,利用水环境中的离子载体来模拟神经形态功能的突触装置如离子二极管和纳流体忆阻器为设计神经形态装置提供了新的机会。
然而,由于高脉冲功耗、有限的信号感知/处理和复杂运动反馈控制回路的限制,纤维织物基神经形态感觉运动功能的实现仍然面临挑战。除此之外,目前流体人工突触设备或平面结构容易引起泄露的安全问题或不舒适,限制了它们在可穿戴/纺织电子产品中的应用。开发具有优异柔韧性、多向感应和编织集成能力的基于离子载体的准固态人工突触纤维是一个巨大的挑战。
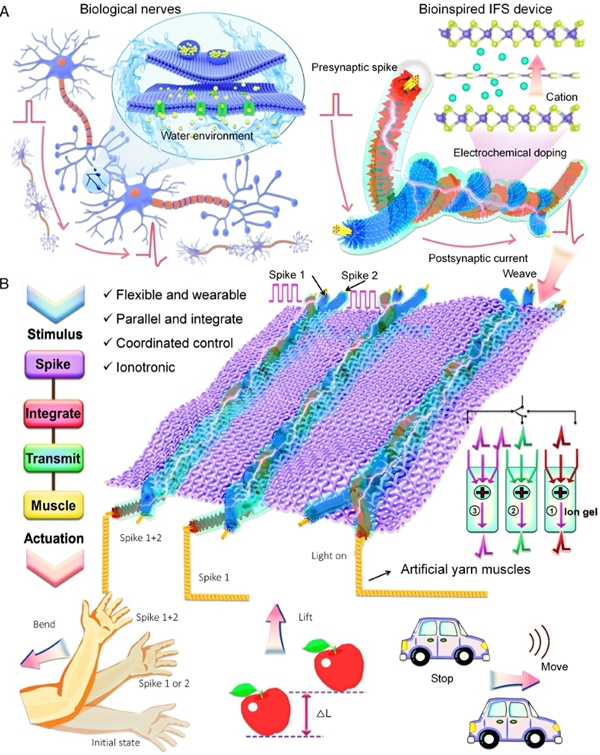
图1. 离电突触纤维 (ISF)及纤维基感知运动应用示意图
针对上述难题,中国科学院苏州纳米所张其冲项目研究员联合山东大学李阳教授和新加坡南洋理工大学魏磊副教授研究团队,报道了一种基于离子载流子的ISF,该器件由光响应TiO2材料、离子存储Co-MoS2材料和凝胶电解质离子传输层组成。简单的结构设计可以模拟出类生物的短时程突触可塑性,化学/光学信号的转导能力以及飞焦耳范围的能量消耗(单次脉冲刺激)。
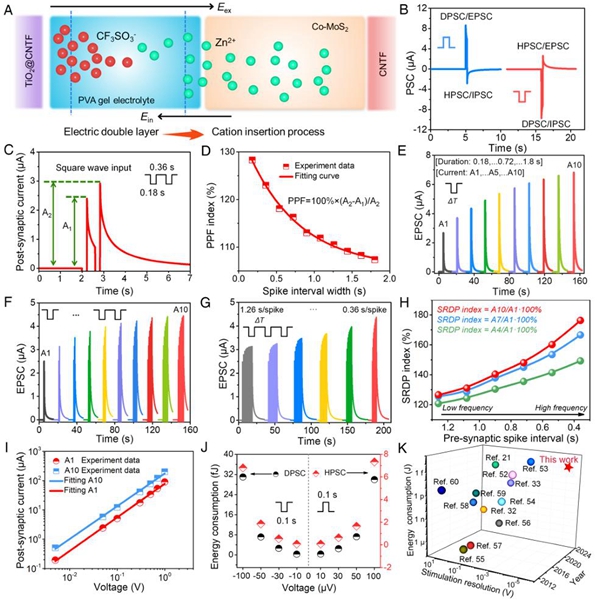
图2. ISF模拟突触特征及短时程可塑性
ISF还可实现维度编织以允许不同的光信号平行传递,模拟了类似轴突的并行信息传输。此外,离子操作机制允许引入多个输入电极进而实现类似树突操作形式的时空信息集成。
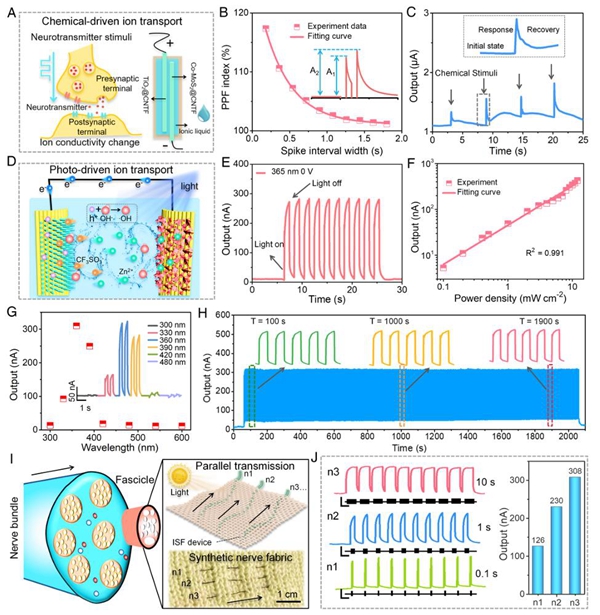
图3. ISF模拟化学/光电信号转导和平行传输
进一步构建了一种基于纺织品的多路神经形态感觉运动系统,将ISF与人造纤维肌肉连接起来,可以实现类似生物感知运动进程的前神经元感知信息的整合、并行传递和运动神经元信息的输出,以控制纤维肌肉的协调运动。全纤维系统在可穿戴电子产品、软机器人和生物医学工程方面具有巨大的应用前景。
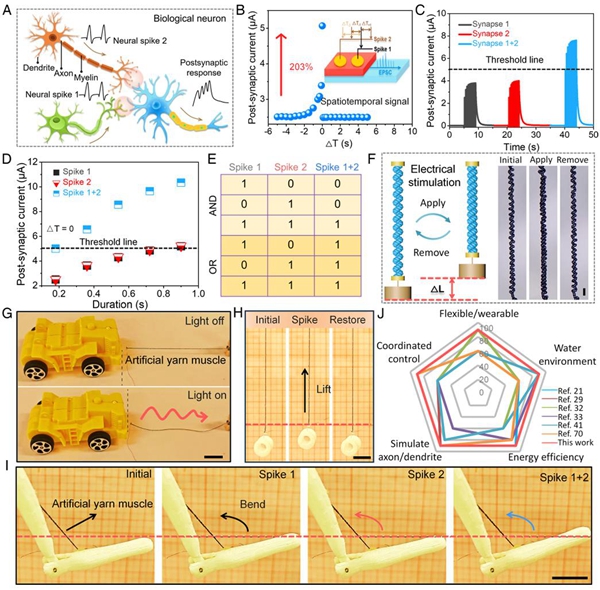
图4. 树突集成和纤维基感知/传输/运动系统应用展示
该工作以Bioinspired iontronic synapse fibers for ultralow- power multiplexing neuromorphic sensorimotor textiles为题发表在国际顶级期刊PNAS上。中国科学院苏州纳米所联合培养陈龙博士和任明博士为论文共同第一作者,山东大学李阳教授、新加坡南洋理工大学魏磊副教授和中国科学院苏州纳米所张其冲项目研究员为共同通讯作者,中国科学院苏州纳米所为第一通讯单位。该工作得到了国家重点研发计划和中国科学院“率先行动”引才计划等项目的支持。




