复旦大学刘沥文:用于自动驾驶汽车地面高程估计的稳健快速点云补全

中文摘要:
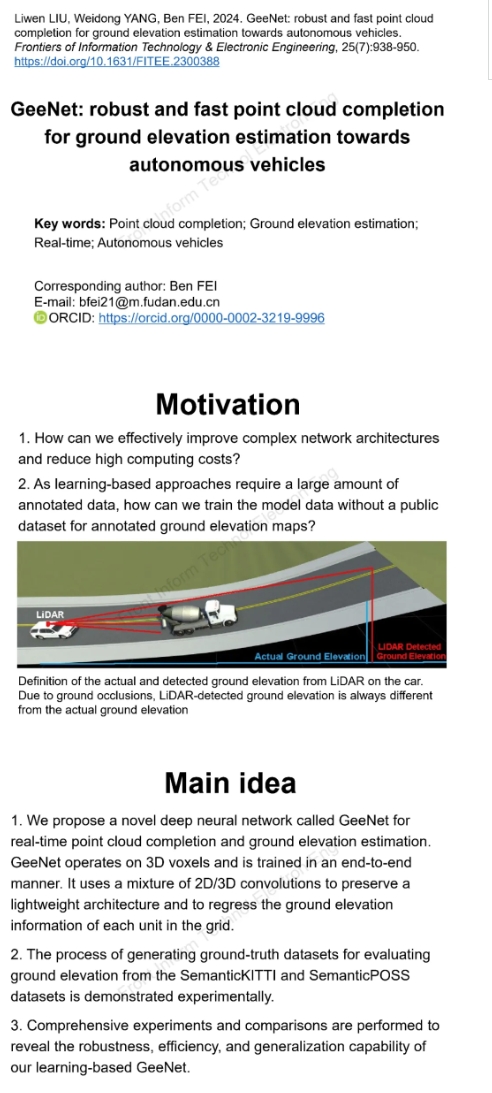
地面高程估计对于无人驾驶汽车和智能机器人的许多应用至关重要,包括三维物体检测、导航空间检测、用于定位的点云匹配和用于建图的配准。然而,现有大多数工作将地面视为没有高度信息的平面,导致这些应用中出现不准确的操作。本文提出一种端到端的轻量级方法GeeNet,可几乎实时地补全地面,同时在基于网格的表示中估计地面高程。GeeNet利用二维/三维卷积的混合来保留轻量级架构,以回归网格每个单元格的地面高程信息。GeeNet首次实现了语义场景补全的地面高程估计。使用SemanticKITTI和SemanticPOSS数据集对GeeNet进行验证,展示了其在地面高程估计和点云语义场景补全方面的定性和定量性能。此外,其跨数据集泛化能力也得到实验证明。相比文献方法,GeeNet取得更好性能,并以0.88 ms运行时实现地面高程估计和地面补全。
关键词:
点云补全;地面高程估计;实时;自动驾驶车辆
作者:
刘沥文,杨卫东,费奔
单位:
1复旦大学计算机学院数据科学上海重点实验室,中国上海市,200433
2珠海复旦创新研究院,中国珠海市,519000
本文引用格式:
Liwen LIU, Weidong YANG, Ben FEI, 2024. GeeNet: robust and fast point cloud completion for ground elevation estimation towards autonomous vehicles. Frontiers of Information Technology & Electronic Engineering, 25(7):938-950.
https://doi.org/10.1631/FITEE.2300388