清华大学深圳国际研究生院冯平法、曾龙团队在具身智能机器人装配系统研究领域取得系列进展

清华新闻网10月25日电,在产品个性化时代,手机、汽车等产品迭代周期越来越短,相应的产品大批量定制生产模式会逐渐普及,即生产订单的零件品类多、批量小。这对产品加工和装配系统的柔性度提出了更高要求,也是智能制造系统的重要发展趋势。目前国内乃至全球都缺乏好的技术解决方案,国内珠三角、长三角等众多制造类企业主要采用人-机混合装配技术,因为人-机混合装配线的柔性强、且可实现跨品类产品的装配。但是,人-机混合装配线的数控化、柔性化、智能化水平低,具有产品装配质量一致性差、效率低等一系列缺点。
针对以上行业痛点,清华大学深圳国际研究生院冯平法教授、曾龙副教授团队,基于机器人、知识图谱、机器视觉、接口快换等技术,提出了跨品类的可重构柔性装配系统。该系统由一定数量完全等同的可重构柔性装配单元,以串联或并联的形式连接而成,每个单元模仿人工装配单元而设计,即可以使用合适的工夹具去完成分配给该单元的装配任务。

图1.跨品类可重构柔性装配系统
该跨品类可重构柔性装配系统具有硬件可重构和软件可重构两大技术特色。硬件可重构,即装配单元的设计是高度模块化的,且组成结构是可重构的,可以使用不同的装配工具和夹具来完成不同的装配任务。多个装配单元可根据待装产品进行灵活布局,并重构配置为该产品的专用装配线。软件可重构,即提出了一种专门面向装配产线的装配语言,集成了机械臂和PLC控制,可根据不同产品的装配工艺编写控制程序,实现可重构柔性装配的数控化,缩短装配线改造成本等,提高企业效率。
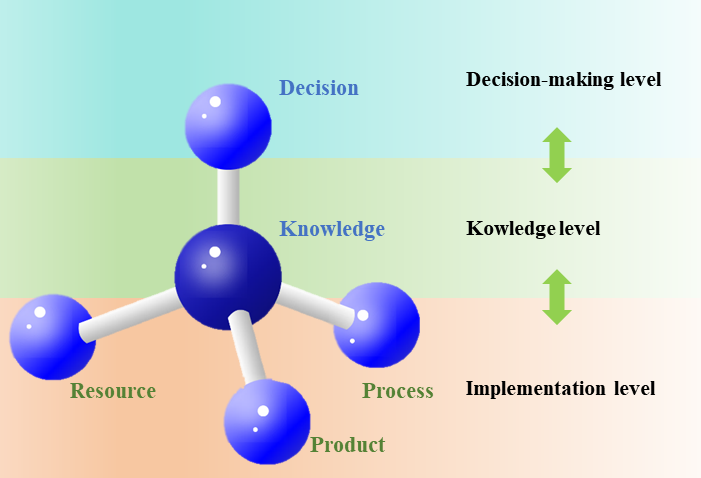
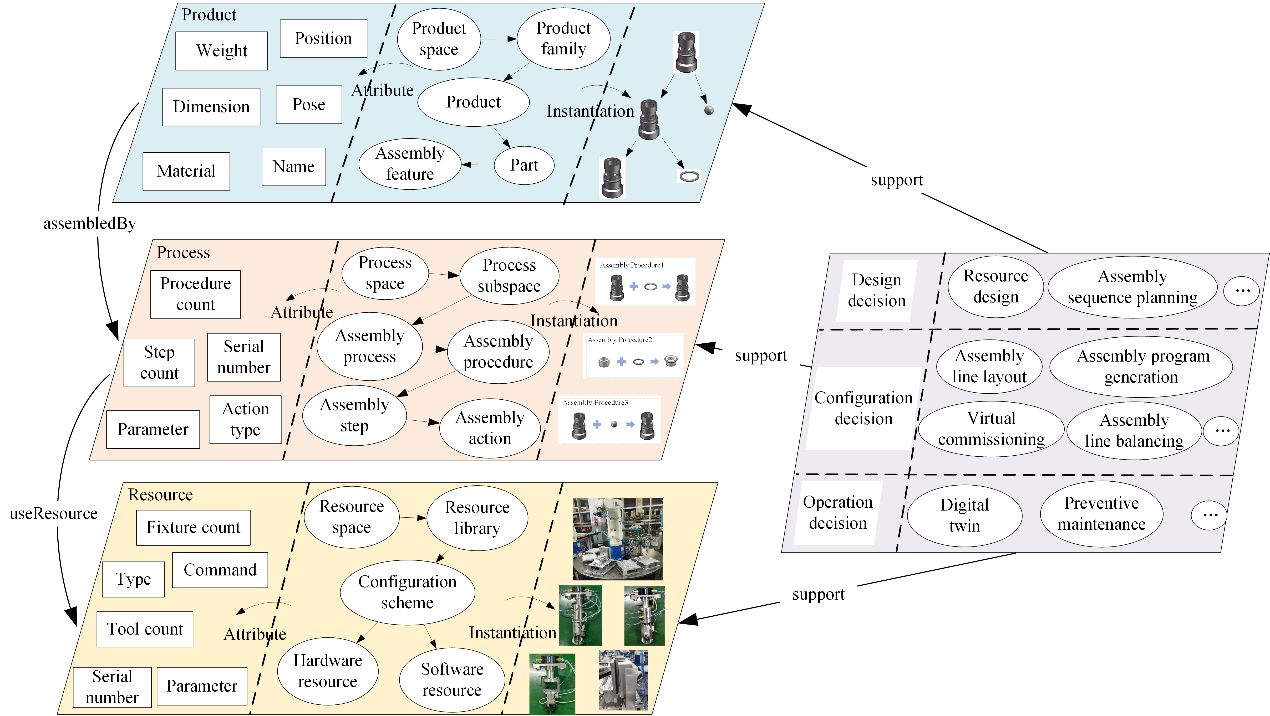
图2.五要素装配模型及其装配知识图谱
为了进一步实现面向跨品类可重构柔性装配产线的智能化,团队近期提出了一种新五要素装配理论模型(图2)和重构技术实现框架(图3)。五要素是指产品、工艺、资源、知识和决策,产品是指待组装的装配对象,工艺描述了产品是如何使用一个或多个装配资源逐步实现装配的,资源指执行工艺的机器、设备或装置,决策包括在整个装配过程中使用的各种装配方法。知识是对前四个要素的表示和存储,通常以结构化的形式表示,如知识图谱。该创新的形式化的五要素装配模型相比现有的装配模型,扩展了知识和决策两个要素,并将他们置于中心,以支持可重构柔性装配系统更柔性化、数控化、智能化。
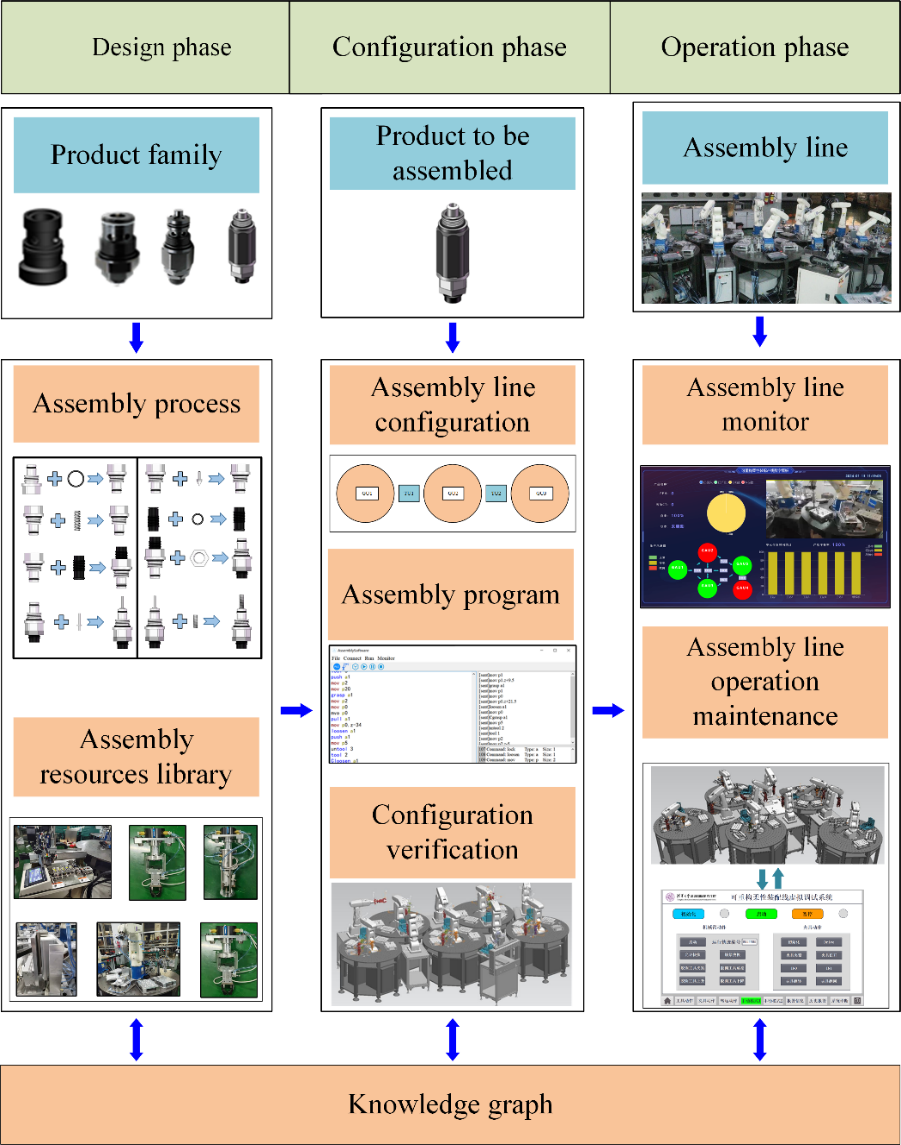
图3.跨品类产品重构技术体系
重构技术实现框架属于决策要素,根据各种装配决策方法的应用阶段,该框架分成设计、配置和操作三个阶段,为用户针对新产品的产线重构提供系统化的指引。在设计阶段,将产品装配中涉及到的各种装配信息(如装配过程、装配步骤、装配动作和规则)总结并存储到知识图谱中,并设计各种支撑资源库。在配置阶段,获得具有最佳布局的装配线,自动生成的装配程序,并使用虚拟调试技术优化形成最终的装配方案。在运行阶段,创建装配线的数字孪生模型,应用装配线运维和决策技术提高产线稳定性、灵活性和智能性。
团队的长期目标是设计并展示一种全新的智能制造系统实现途径,即具身智能工业机器人装配系统,兼具柔性化、数控化和智能化三大技术特色。该总体目标分为三个实现阶段,目前完成柔性化和数控化,已经能够被广大智能制造企业实际使用。团队围绕可重构柔性装配系统已经申请或授权了发明专利27项,完成了技术成果产业化,并实现了跨品类可重构柔性装配技术的落地应用,在工业连接器行业大型央企得到成功应用,产生显著的智能制造经济效益。
未来,团队将专注于具身智能机器人装配系统的相关研究,尤其基于知识图谱、语义地图的具身智能机器人技术,将显著提高已有可重构柔性装配系统的智能化程度。
相关工作分别以“面向可重构柔性装配线的装配语言设计与开发”(Assembly language design and development for reconfigurable flexible assembly line)和“面向跨品类产品的可重构柔性装配模型与实现体系”(Reconfigurable flexible assembly model and implementation for cross-category products)为题,发表在《机器人与计算机集成制造》(Robotics and Computer-Integrated Manufacturing)和《制造系统杂志》(Journal of Manufacturing Systems,JMS)上。
曾龙为上述论文的通讯作者。“面向可重构柔性装配线的装配语言设计与开发”论文的第一作者为深圳国际研究生院2019级硕士肖磊才,其他作者包括2021级博士生徐赵博和深圳国际研究生院副研究员刘学平。“面向跨品类产品的可重构柔性装配模型与实现体系”论文第一作者为徐赵博,论文作者还包括冯平法、2023级硕士生张超然和2021级硕士胡松。研究得到广东省自然科学基金面上项目、深圳市高等学校稳定支持重点项目的资助。





